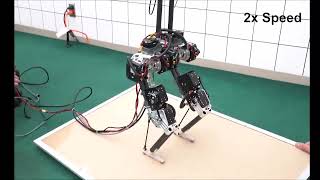
Design and Control of a Miniature Bipedal Robot with Proprioceptive Actuation for Dynamic Behaviors
Similar Tracks
How do we describe a robot? With URDF! | Getting Ready to build Robots with ROS #7
Articulated Robotics
Gerardo Bledt (MIT): Generalizing and improving regularized predictive control for legged robots
MPCRL 2021